
公司历史
Kithara已有20多年的历史,积累了许多的历史经验。但是,为了确保我们能够像我们的软件一样保持实时效率,本页只是简要介绍了公司的核心发展情况,尤其是与现在相关的发展情况。
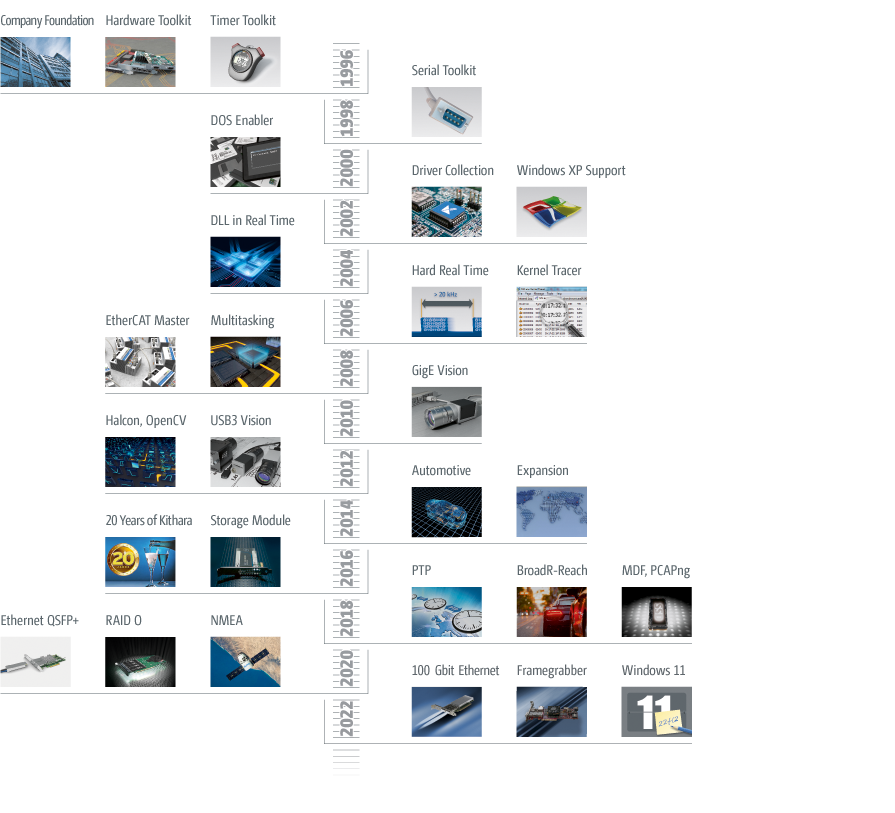
1996年
Kithara的第一步是在Windows 95下进行硬件相关编程的开发工具。“硬件工具包”允许通过访问I/O端口,物理内存以及中断处理来开发设备驱动程序。使用“定时器工具包”,可以在内核级别实现高分辨率定时器例程。
1998年
“串行工具包”为所有可用的COM接口提供了实时串行通信,现在也在Windows NT上。 尽管上面提到的工具包不再被Kithara支持,但是它们的许多子功能已经并入了Kithara实时套件的模块中。
2000年
Kithara DOS Enabler的第一个版本允许纯MS-DOS应用在Windows操作系统上运行。由于没有虚拟化,DOS也可以用于实时功能。15年后,由于受欢迎的需求,最新的Kithara DOS Enabler使该功能可用于现代Windows系统,并且还大大提高了实时性能。
2002年
Available even today, Kithara Driver Collection直到今天也依然可以使用。它结合了许多不同的开发者工具进行硬件编程,并且提供了大量优化的软件包。也是在这一年开始,Windows XP成为支持的操作系统之一。
2004年
Kithara实时系统的构建在2004年进行了全面修订。它还包括一个全新的示例模式,对设置进行大的修改,以及将应用程序代码加载到内核级别的能力,方法是将DLL加载到实时上下文。
2006年
开发高频计时器显着提高了Kithara实时套件对“硬”实时性的保证响应时间。在定时器频率高达20 kHz以上的情况下,首次可实现仅几微秒的最大抖动。同样在2006年开发的Kithara内核跟踪器到今天为止仍然是错误分析和纠正的最重要工具。
2008年
Kithara用于实时以太网通信的完善的网络驱动器是工业网络中最重要的发展之一。 基于它的EtherCAT主站现在是Kithara实时套件的核心要素之一,也是公司在工业自动化领域最重要的进展之一。 同时,Kithara的实时系统通过强大的多任务环境得到了增强。 作为优先级驱动的抢先式多任务系统,Kithara实时套件首次在性能和功能上等同于纯粹的实时操作系统。
2010年
Kithara还专注于2010年的机器视觉等专业工业领域。为了即时采集工业相机的图像数据,基于千兆以太网的GigEVision®接口在实时扩展中得到了支持。
2012年
在图像采集之后,实时图像处理的步骤是合乎逻辑的结果。支持Halcon图像处理库,以及后来的OpenCV,可立即控制传入的图像数据。同样,随后也开始了USB3Vision相机的开发。
2014年
Kithara与另一个大型工业部门进入汽车行业。 CAN FD,FlexRay,LIN和BroadR-Reach汽车总线系统的实时性能主要用于解决测试设备制造商和供应商的问题,这些厂商和供应商的任务是汽车网络日益增长的重要性。 为了满足全球对Kithara产品日益增长的兴趣,美国和中国的首批国际机构也已经建立。
2016年
Kithara于2016年推出了软木塞并庆祝其成立20周年。同样,Kithara RealTime Suite也在版本10发布时庆祝了这个新版本。这个新版本带来了许多重要的变化,这些变化将使实时系统更加面向未来,并且客户友好。此外,新的存储模块还引入了高性能的大数据管理功能,可以在图像捕获或测量数据存储等领域实现极其苛刻的应用。
2018年
实现了PTP的支持,这使得分布式系统中的网络参与者可以精确同步,甚至可以在全球范围内同步,并可以通过Kithara RealTime Suite进行实时控制。 凭借多年在以太网方面的专业知识,Kithara能够将BroadR-Reach添加到受支持的汽车接口列表中。 汽车以太网的物理传输层被认为具有特别的前瞻性。 基于存储模块,成功完成了测量数据标准MDF和PCAPng的实现。 这可能为具有实时需求的大测量数据领域的应用铺平了道路。
2020年
实时以太网一直是Kithara的支柱,现在,通过使用QSFP+,它也允许高达40 Gbit/s的吞吐速率。 由于支持RAID-0功能,数据存储领域飞速发展,读写速度成倍增长。 该公司的实时系统首次涉足机器学习领域,其中涉及各种软件库,这些软件库提供了用于对复杂的自学应用程序进行编程的算法。 此外,通过简化的配置文件gPTP以及带有NMEA的GPS功能,进一步扩展了时间同步。
2022年
我们的以太网开发没有间断:由于支持英特尔控制器 E810,Kithara 现在已经达到了 100-Gigabit 的网络通信里程碑。 与 PLC2 合作,GigE Vision 图像采集卡 PGC-1000 现在可以在 Kithara 实时操作系统中使用,在机器视觉过程中实现几乎完全的 CPU 卸载。 针对 Windows 11,Kithara RealTime Suite 11 也及时发布,包括对流行操作系统的支持。